Το Spartan Edge Accelerator Board είναι ένα φθηνό development board βασισμένο στο FPGA Spartan-7 της Xillinx. Περιλαμβάνει επίσης, ένα ESP32 που παρέχει συνδεσιμότητα WiFi και Bluetooth και είναι σχεδιασμένο για να υποστηρίζει τη σύνδεση, ως shield, σε Arduino. Τα σχέδια του κυκλώματος είναι υπό την άδεια open hardware και είναι διαθέσιμα στο github.

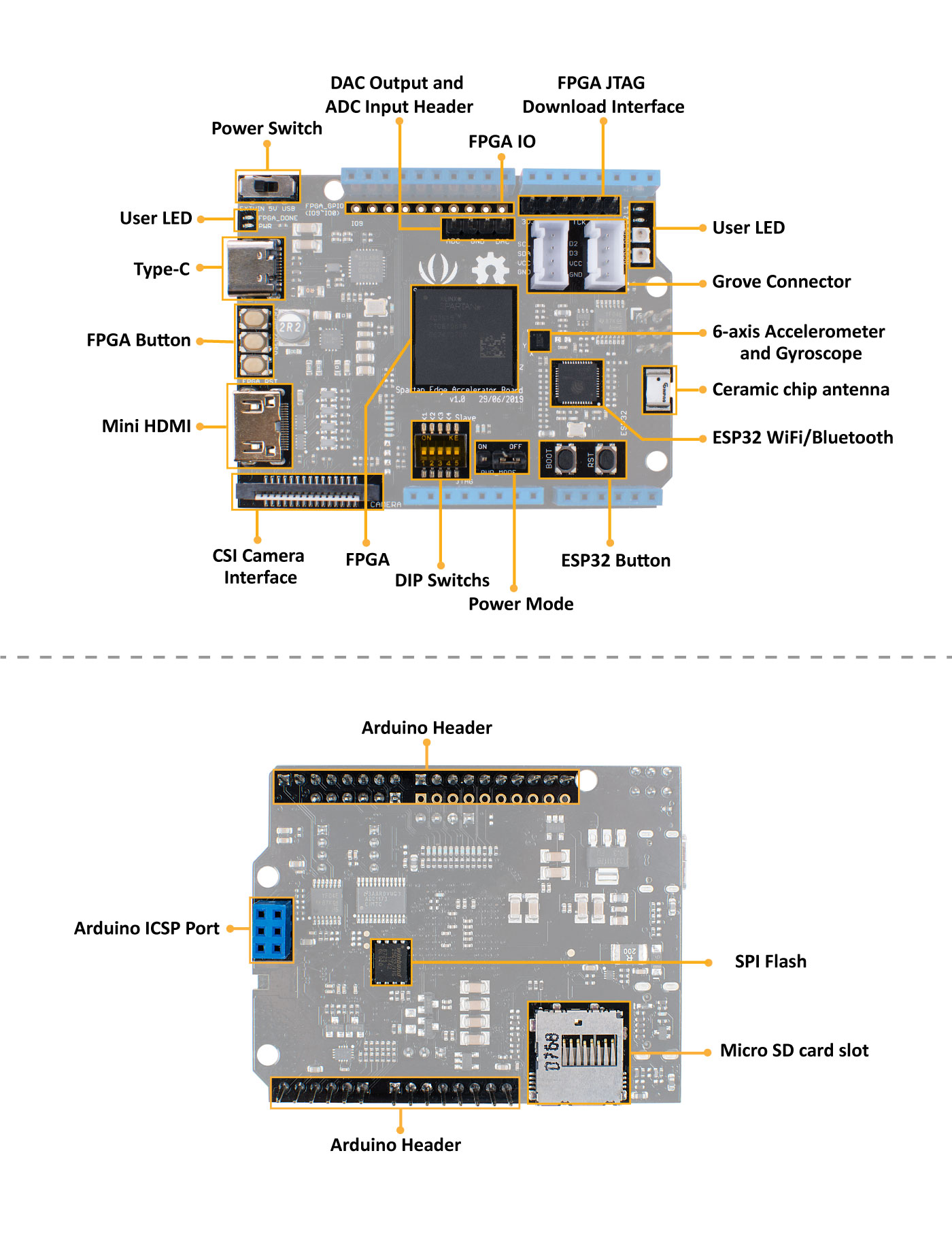
Διατίθεται από τη Seeedstudio εδώ και μερικούς μήνες στην τιμή $35. Για όποιον ενδιαφέρεται γενικότερα για τις δυνατότητες που προσφέρουν τα FPGA και πως μπορεί κάποιος να ασχοληθεί, μπορεί να διαβάσει ένα ενδιαφέρον άρθρο εδώ. Στην εικόνα παρακάτω, διακρίνονται τα βασικά χαρακτηριστικά του SEA board:
 Για τον προγραμματισμό του, υπάρχουν δύο διαθέσιμα modes:
Για τον προγραμματισμό του, υπάρχουν δύο διαθέσιμα modes:
που πρακτικά σημαίνει ότι μπορούμε να προγραμματίσουμε το FPGA με το Arduino IDE, αλλά και με το εργαλείο σύνθεσης κυκλωμάτων της Xillinx (Vitis/Vivado).
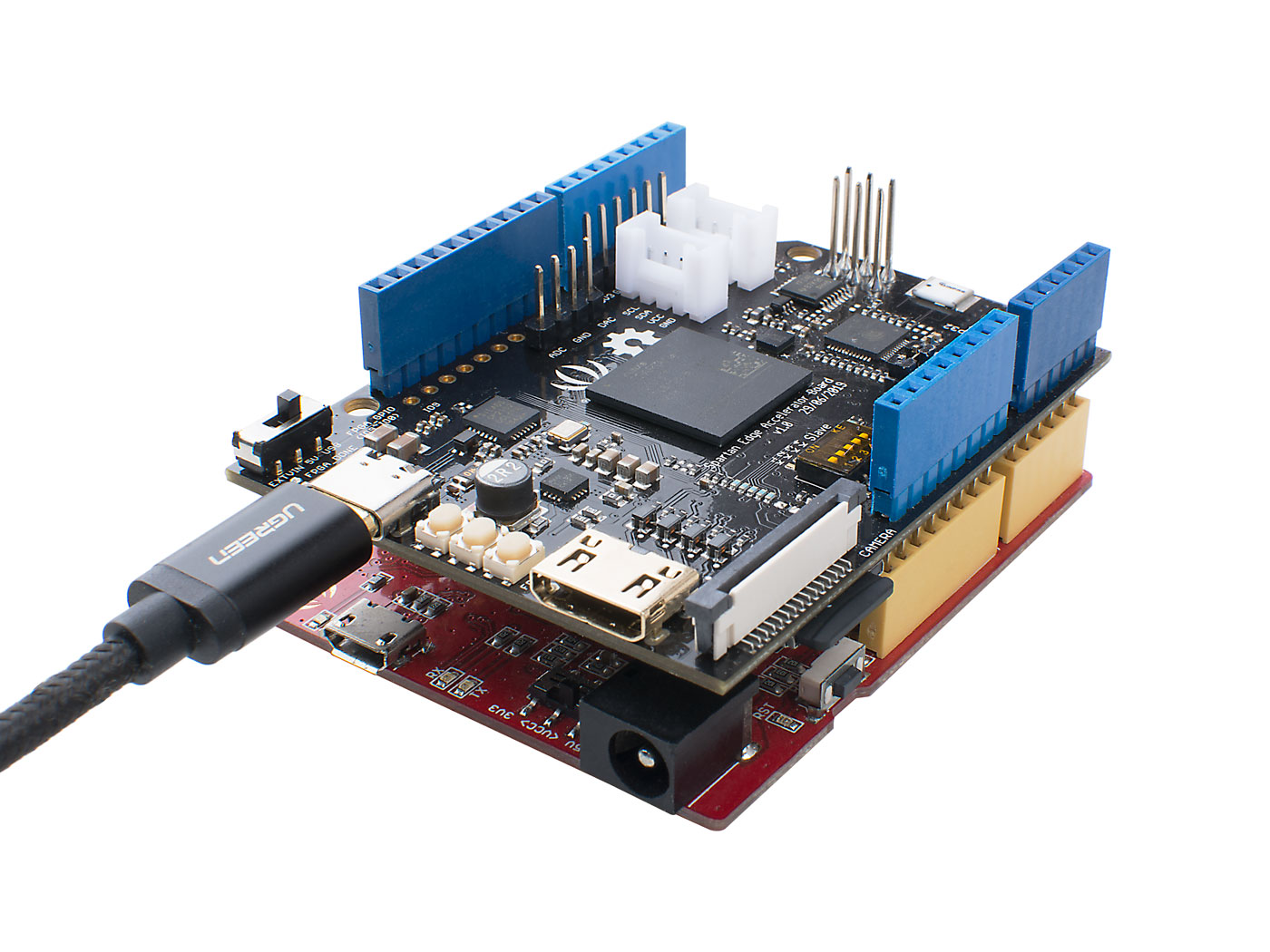
Στο Arduino shield Mode, ο κώδικας (bitstream) μεταφέρεται από την κάρτα sd, μέσω του ESP32, στο FPGA, που λειτουργεί ως ένα hard processor system (HPS). Η διαδικασία περιγράφεται αναλυτικά στο wiki.
 Το Spartan Edge Accelerator Board περιέχει το Xilinx Spartan-7 XC7S15 FPGA, που είναι ένα φθηνό μεν, αλλά αρκετά δυνατό, FPGA chip. Μιλώντας για Arduino FPGA, δε θα πρέπει να να ξεχνάμε να αναφέρουμε και το πρωτοπόρο Arduino MKR Vidor 4000. Συγκρίνοντάς το με το επίσημο Arduino MKR Vidor
4000, το Spartan Edge Accelerator Board παρέχει παρόμοιες δυνατότητες, στη μισή τιμή! Το Spartan Edge Accelerator Board μπορεί να υποστηρίξει μέχρι 100Mhz clock speed και διαθέτει 12.8K logic cells με 360Kb block RAM. Μπορεί ακόμα να οδηγήσει μια camera ή μια HDMI οθόνη με ευκολία. Διαθέσιμα είναι και 10 user-programmable I/O pins στο XC7S15, τα οποία μπορείς να τα ορίσεις κατά βούληση, πχ ως PWM, I2C, I2S, UART, SPI, κλπ.
Το Spartan Edge Accelerator Board περιέχει το Xilinx Spartan-7 XC7S15 FPGA, που είναι ένα φθηνό μεν, αλλά αρκετά δυνατό, FPGA chip. Μιλώντας για Arduino FPGA, δε θα πρέπει να να ξεχνάμε να αναφέρουμε και το πρωτοπόρο Arduino MKR Vidor 4000. Συγκρίνοντάς το με το επίσημο Arduino MKR Vidor
4000, το Spartan Edge Accelerator Board παρέχει παρόμοιες δυνατότητες, στη μισή τιμή! Το Spartan Edge Accelerator Board μπορεί να υποστηρίξει μέχρι 100Mhz clock speed και διαθέτει 12.8K logic cells με 360Kb block RAM. Μπορεί ακόμα να οδηγήσει μια camera ή μια HDMI οθόνη με ευκολία. Διαθέσιμα είναι και 10 user-programmable I/O pins στο XC7S15, τα οποία μπορείς να τα ορίσεις κατά βούληση, πχ ως PWM, I2C, I2S, UART, SPI, κλπ.
Στο github υπάρχει η βιβλιοθήκη για το Arduino IDE:
spartan-edge-esp32-boot
που περιλαμβάνει μερικά βασικά παραδείγματα για τη δοκιμή προγραμματισμού του FPGA.
Παρακάτω, μερικά screenshot (compile & upload):


βίντεο παρουσίασης:

Διατίθεται από τη Seeedstudio εδώ και μερικούς μήνες στην τιμή $35. Για όποιον ενδιαφέρεται γενικότερα για τις δυνατότητες που προσφέρουν τα FPGA και πως μπορεί κάποιος να ασχοληθεί, μπορεί να διαβάσει ένα ενδιαφέρον άρθρο εδώ. Στην εικόνα παρακάτω, διακρίνονται τα βασικά χαρακτηριστικά του SEA board:
- Arduino shield Mode
- Stand-alone Mode
που πρακτικά σημαίνει ότι μπορούμε να προγραμματίσουμε το FPGA με το Arduino IDE, αλλά και με το εργαλείο σύνθεσης κυκλωμάτων της Xillinx (Vitis/Vivado).
Στο Arduino shield Mode, ο κώδικας (bitstream) μεταφέρεται από την κάρτα sd, μέσω του ESP32, στο FPGA, που λειτουργεί ως ένα hard processor system (HPS). Η διαδικασία περιγράφεται αναλυτικά στο wiki.
Στο github υπάρχει η βιβλιοθήκη για το Arduino IDE:
spartan-edge-esp32-boot
που περιλαμβάνει μερικά βασικά παραδείγματα για τη δοκιμή προγραμματισμού του FPGA.
Παρακάτω, μερικά screenshot (compile & upload):


βίντεο παρουσίασης: